
In the JuBot project, funded by the Carl Zeiss Foundation Fund, humanoid assistance robots and wearable exoskeletons are being developed that provide personalized, learning assistance for seniors to cope with everyday life . Key issues in assistance robotics are addressed with a human-centered approach. The focus is on assistance in the home by humanoid robots as well as personalized training to increase mobility and reinforce motor skills with wearable exoskeletons. The systems and methods of assistance robotics are developed with regard to a diverse and personalizable application and tested in real everyday environments. The project is divided into four research areas focusing on Mechano-Informatics, personalized and context-sensitive assistance, motor and cognitive training as well as life with assistive robots in the future .
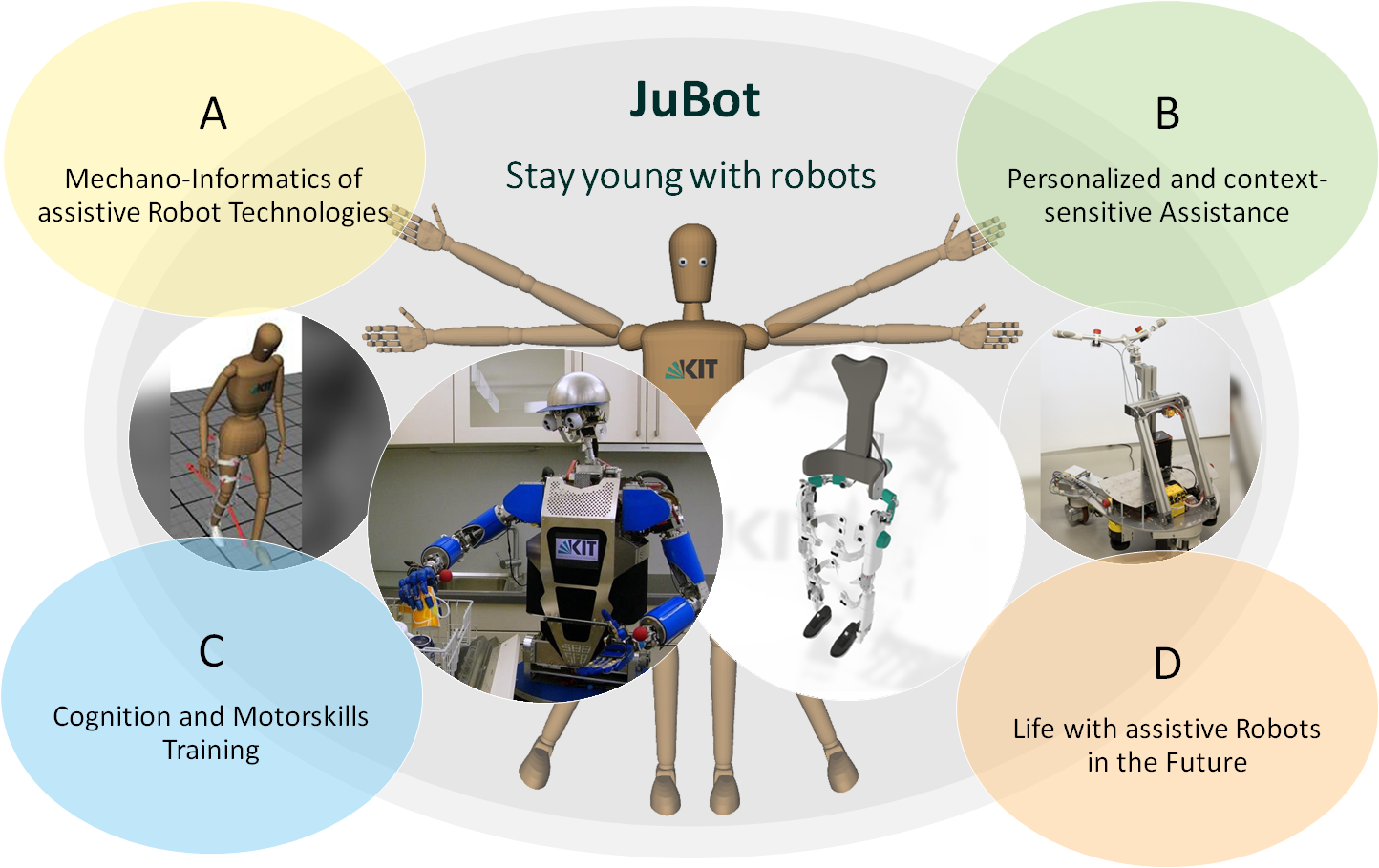
Mechano-Informatics of assistive robot technologies
The mechano-informatic development of humanoid assistive robots and exoskeletons combines skills from basic research and application-oriented research in mechatronics, computer science and artificial intelligence. In this way, robotic systems with comprehensive cognitive and sensorimotor capabilities for interaction in real everyday situations are created. In addition, IT security, privacy and resource efficiency of the systems are taken into account and soft robotics methods are applied.
Personalized and context-sensitive assistance
For the interaction with elderly people, research is being conducted on environment perception and communication of the assistance robots. These should recognize the support needed by the human from the context and interact using natural language. Assistance functions will be personalized and offered by the robot depending on the situation. In addition, existing assistance functions will be improved and expanded through incremental learning.
Cognitive and motorskills training
This research area focuses on support and training of the mobility of elderly people with assistive exoskeletons. The optimal adaptation of the exoskeleton to the individual user is taken into account. Robot-assisted diagnostic procedures are being developed to analyze current performance. Based on this, work is being done on personalized, robot-assisted training programs for various motor skills.
Life with assistive robots in the future
The assistance robots developed in JuBot will be evaluated in realistic environments from the very start. For this purpose, human-robot apartments will be set up at the Karlsruhe Institute of Technology and, in cooperation with the Heimstiftung Karlsruhe, in a senior citizens' center. In this way, the opinions and needs of users will be integrated into the development process from the very beginning in order to develop human-centered, needs-based robotic assistance systems. In parallel, the requirements of future living spaces for people with robotic assistance are being investigated in order to take them into account as early as the building planning stage.